30 Apr Volumetric Particle Tracking Velocimetry (PTV) Uncertainty Quantification
Volumetric Particle Tracking Velocimetry (PTV) non-invasively measures the 3D velocity field by recording successive snapshots of the tracer particle motion using a multi-camera set-up. A key step in the measurement chain is reconstructing the 3D particle location using the multi-camera projected particle images. However, the ambiguity in matching particle images, especially for higher particle concentration makes the process challenging. Recent developments like IPR (Wieneke 2013) and Shake-the-Box (Schanz et al. 2016) have significantly improved the reconstruction accuracy. However, the uncertainty in the 3D PTV reconstruction process has not been quantified. The non-linear combination of the elemental error sources during the iterative self-calibration correction and particle reconstruction steps increases the complexity of the task. Hence, we introduce the first comprehensive approach to determine the uncertainty in volumetric PTV measurements. Here, we first estimate the uncertainty in the particle image location, which we model as a combination of the particle position estimation uncertainty and the reprojection error uncertainty. Next, we determine the uncertainty in the camera calibration coefficients. As a final step, the previous two uncertainties are combined using an uncertainty propagation through the volumetric reconstruction process. The uncertainty in the velocity vector is directly obtained as a function of the reconstructed particle position uncertainty. The framework is successfully validated for synthetic and experimental cases. This methodology not only provides an estimate of 3D PTV reconstruction and velocity uncertainty but also provides a platform to estimate uncertainty in velocity derived quantities as well as any uncertainty informed velocity track filtering.

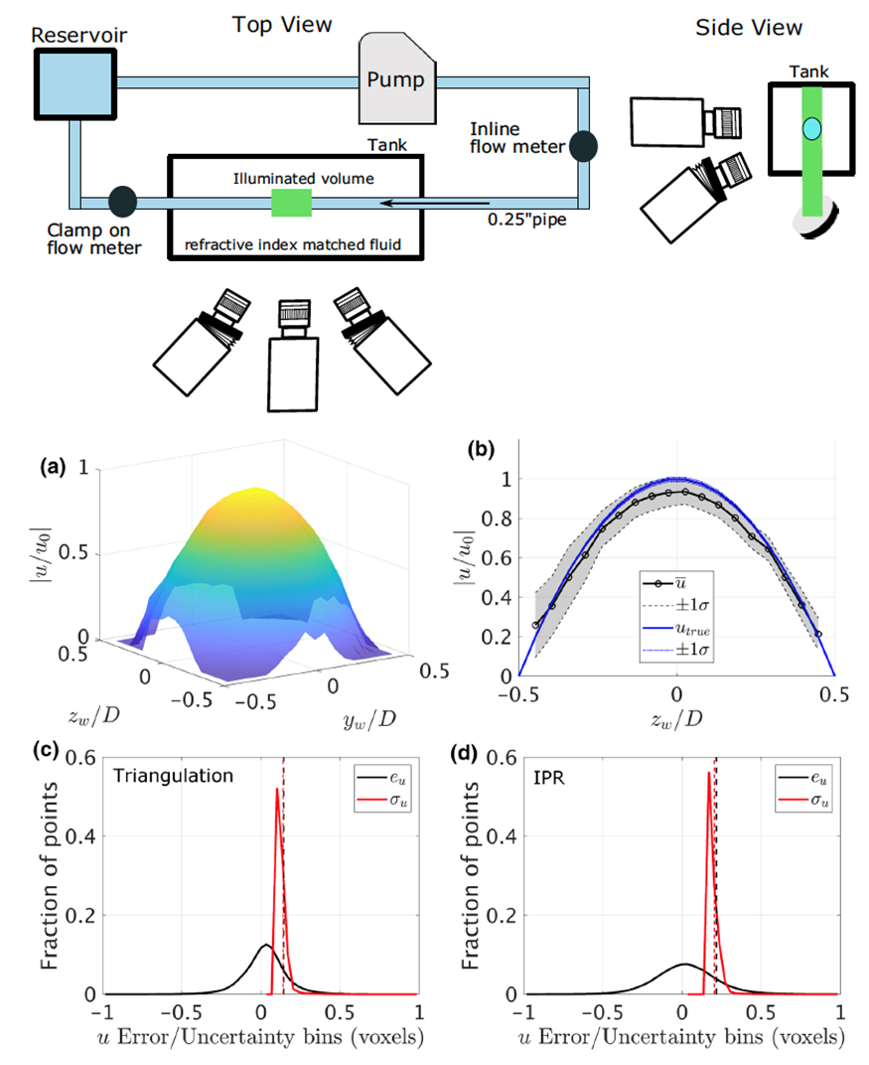
The percentage of measurements within the uncertainty bounds (estimated coverage) is compared against percentage of measurements falling within RMS error bounds (ideal coverage) in subplots (c and d). The comparison is presented as a function of seeding density in the range of 0.01–0.1 ppp and for triangulation and IPR based reconstructions. The results show good sensitivity of RMS uncertainty to the RMS error in measurement.
No Comments